PHOTONEO
Bin picking studio
Bin picking, även kallat robotic bin picking eller automated bin picking, är en teknik som används inom industriell automation för att hämta föremål eller delar från en bin (låda) eller pall. Det innebär att man använder ett robotsystem utrustat med sensorer, kameror och avancerade algoritmer för att identifiera, lokalisera och greppa föremål och placera dem i t ex en fixtur eller på ett löpande band för vidare hantering. Föremålen som plockas kan antingen vara helt osorterade (random bin picking) eller delvis sorterade.
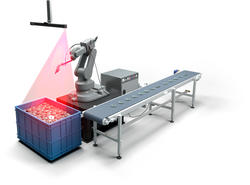
Bin Picking Studio kan hantera objekt i en mängd olika material och som är slumpmässigt placerade i exempelvis pallar och mata dem vidare i tillverkningen. Med en Phoxi scanner som antingen är fast monterad över pallen eller monterad på robotarmen skannas objekten av. Med hjälp av CAD-filen av objektet identifierar vision controllern sedan vilka objekt som är plockningsbara. Koordinater för robotstyrningen som dessutom tar hänsyn till omgivande föremål skickas sedan till roboten som kan placera objektet med stor precision.
- CAD-baserad lösning för precis plockning och placering
- Fullständig path planning och collision avoidance
- Kompatibel med hundratals robotmodeller från de ledande robottillverkarna
- Lättanvänt webbinterface
- Integrerad med Phoxi eller Motioncam 3D-skanner


Vald variant

Teknisk data
Teknisk data saknas
Produktbeskrivning
Bin picking, även kallat robotic bin picking eller automated bin picking, är en teknik som används inom industriell automation för att hämta föremål eller delar från en bin (låda) eller pall. Det innebär att man använder ett robotsystem utrustat med sensorer, kameror och avancerade algoritmer för att identifiera, lokalisera och greppa föremål och placera dem i t ex en fixtur eller på ett löpande band för vidare hantering. Föremålen som plockas kan antingen vara helt osorterade (random bin picking) eller delvis sorterade.
Bin Picking Studio kan hantera objekt i en mängd olika material och som är slumpmässigt placerade i exempelvis pallar och mata dem vidare i tillverkningen. Med en Phoxi scanner som antingen är fast monterad över pallen eller monterad på robotarmen skannas objekten av. Med hjälp av CAD-filen av objektet identifierar vision controllern sedan vilka objekt som är plockningsbara. Koordinater för robotstyrningen som dessutom tar hänsyn till omgivande föremål skickas sedan till roboten som kan placera objektet med stor precision.
Lär dig mer i Inspo

Photoneo uppdaterar mjukvaran Bin Picking Studio
Bin Picking Studio (BPS) är en robust mjukvarulösning för dina plockprojekt. Nu uppdaterar och förbättrar Photoneo mjukvaran ytterligare med hjälp av feedbacken från sin support och sina kunder för att kunna spegla branschens exakta behov.

Photoneo Sensors Training - Webinar x 3
OEM Automatic tillsammans med Photoneo erbjuder dig nu möjligheten att helt kostnadsfritt delta i tre olika webinar. Fokuset kommer ligga på PhoXI 3D-Scanner, MotionCam-3D, Localization SDK och Bin Picking.

Vi ställer ut på Metal Inspiration Days
Den 24-25 november är det åter igen dags för MID, Metal Inspiration Days, i Jönköping. Vårt produktområde Bildanalys & Vision är på plats för andra gången och Johan Kastensson, säljledare, berättar mer.

Pekat Vision - Nu med smartkamera!
Pekat Vision lanserar nu en attraktiv allt-i-ett-lösning för kvalitetsinspektion med AI.

Minimala tillverkningsfel med rätt visionlösning
Spring Systems tillverkare av tråd- och fjäderprodukter för bl.a. fordonsindustrin är vana att arbeta mot höga toleranskrav. Förlustsiffror, tillverkningsfel och besvärliga produkter vändes till framgångssiffror med visionlösning från OEM Automatic.

Flexibel plattform för visionapplikationer
Nya Matrox Design Assistant 4 är en användarvänlig flödesschemabaserad mjukvara som är avsedd för avsyning och kvalitetskontroll.
 Johan Kastensson
Johan Kastensson 


